
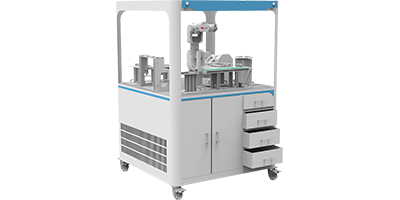
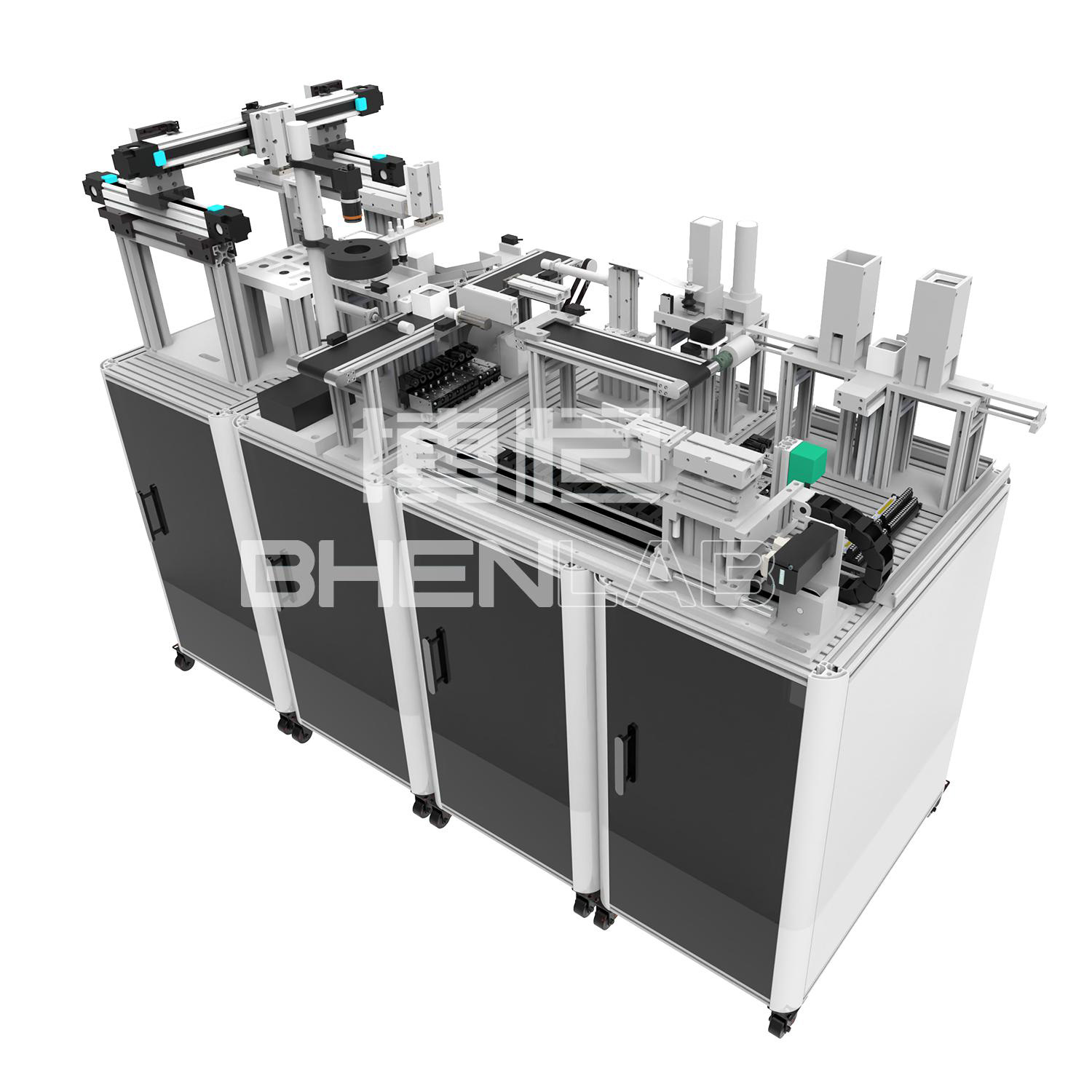
Industrial robot
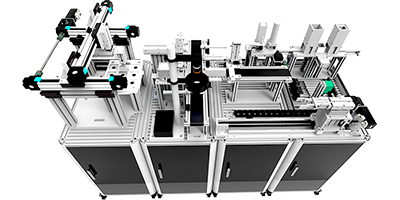

Virtual real combination production line training equipment
Our equipment adopts the latest industrial robotic arms, combined with advanced vision and controllers, to ensure that you are exposed to the most advanced automation technology. Whether it's material handling or trajectory simulation, we can provide a comprehensive practical training experience.
Product Features

Module design
The device adopts a modular design, which is easy to move, easy to update and iterate in the future, and can replace modules separately, reducing maintenance costs.

Comprehensive technology
The equipment covers technologies such as interconnection, transmission, human-machine, vision, machinery, sensing, and communication.

Integration of Industry and Education
The equipment is close to the actual particle filling production line, which facilitates the integration of schools and enterprises in industrial teaching.

selective focus
The equipment is equipped with simulation models and supports digital twin hardware expansion.
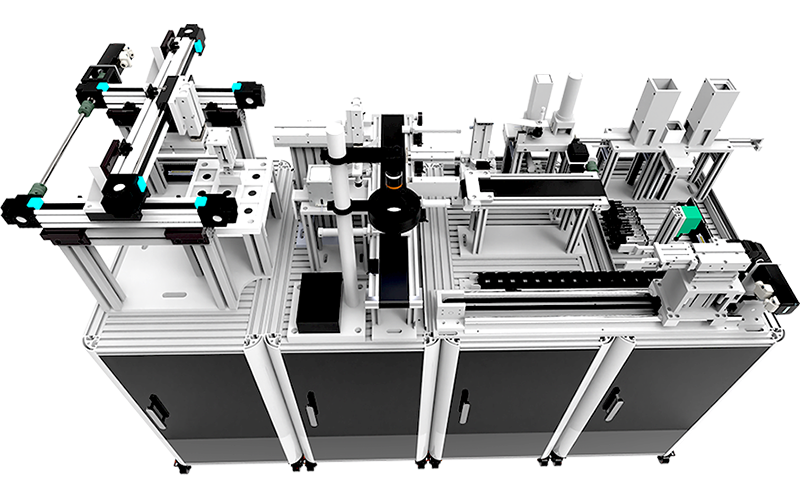
Group Display

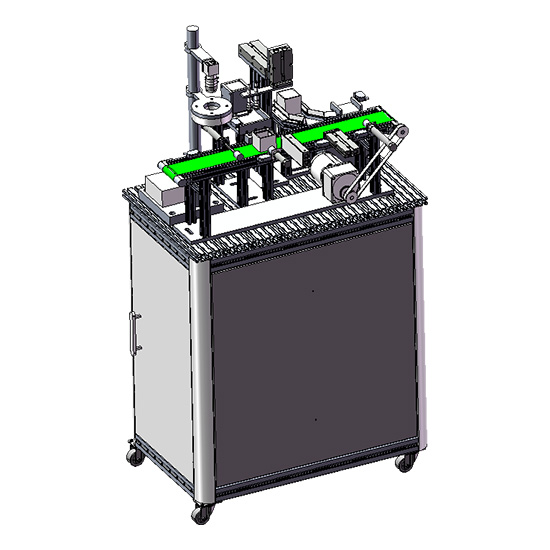
Material supply workstation
The main body of the feeding workstation consists of a bottle feeding unit, a bottle information reading and writing unit, and a slide table manipulator. As shown in the figure, it is the bottle feeding unit of the feeding workstation.
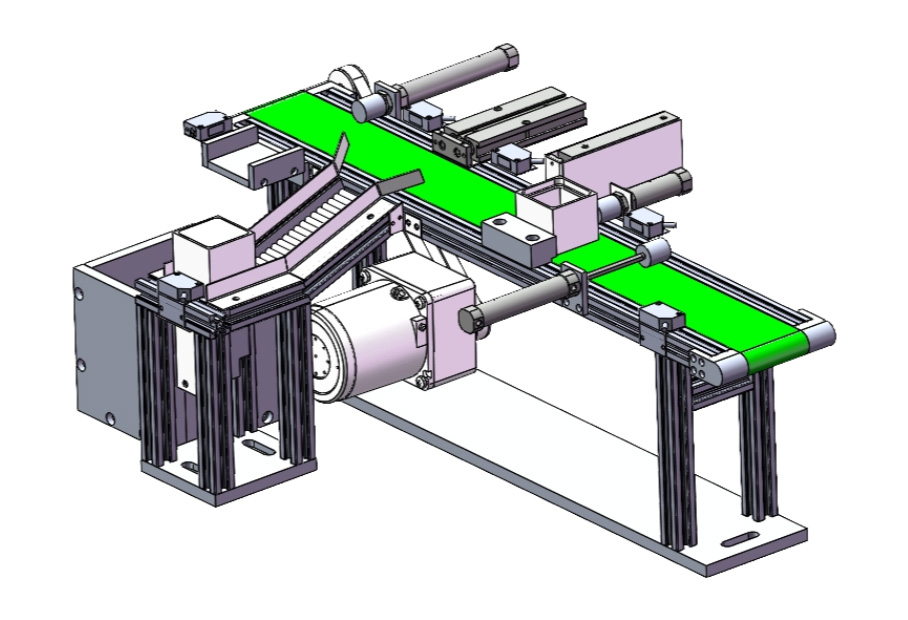
Assembly workstation
The assembly workstation mainly consists of an assembly material feeding unit, an assembly unit, an order information recognition module, and a horizontal conveying unit.
Detection workstation
The inspection workstation includes visual inspection unit, upper cover assembly unit, vertical conveying unit, etc. After the assembly workstation is completed, the mechanical arm handling unit transfers the material from the horizontal conveying unit to the vertical conveying unit. After passing through the visual inspection mechanism, it determines whether the material is covered and transported into the warehouse or kicked for waste recycling.

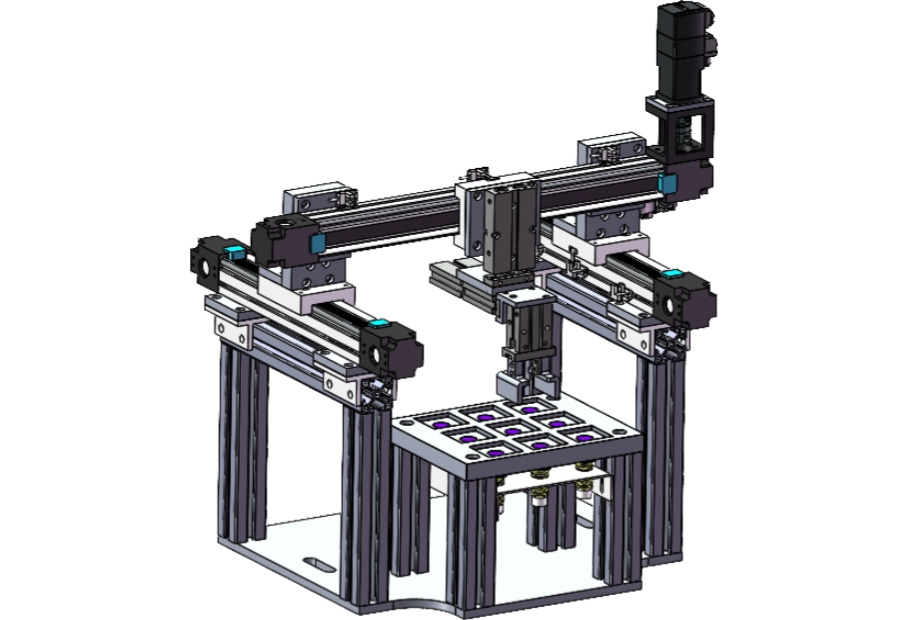
Storage workstation
The storage workstation mainly consists of gantry manipulator module, information reading module (RFID), and storage platform module. Before the operation of the storage workstation, the materials of the detection workstation should be slid onto the storage track. After the information reading module reads the content and recognizes it, the corresponding storage location is allocated based on the read information. The gantry robot module grabs the assembled products and transports them to the corresponding storage location.
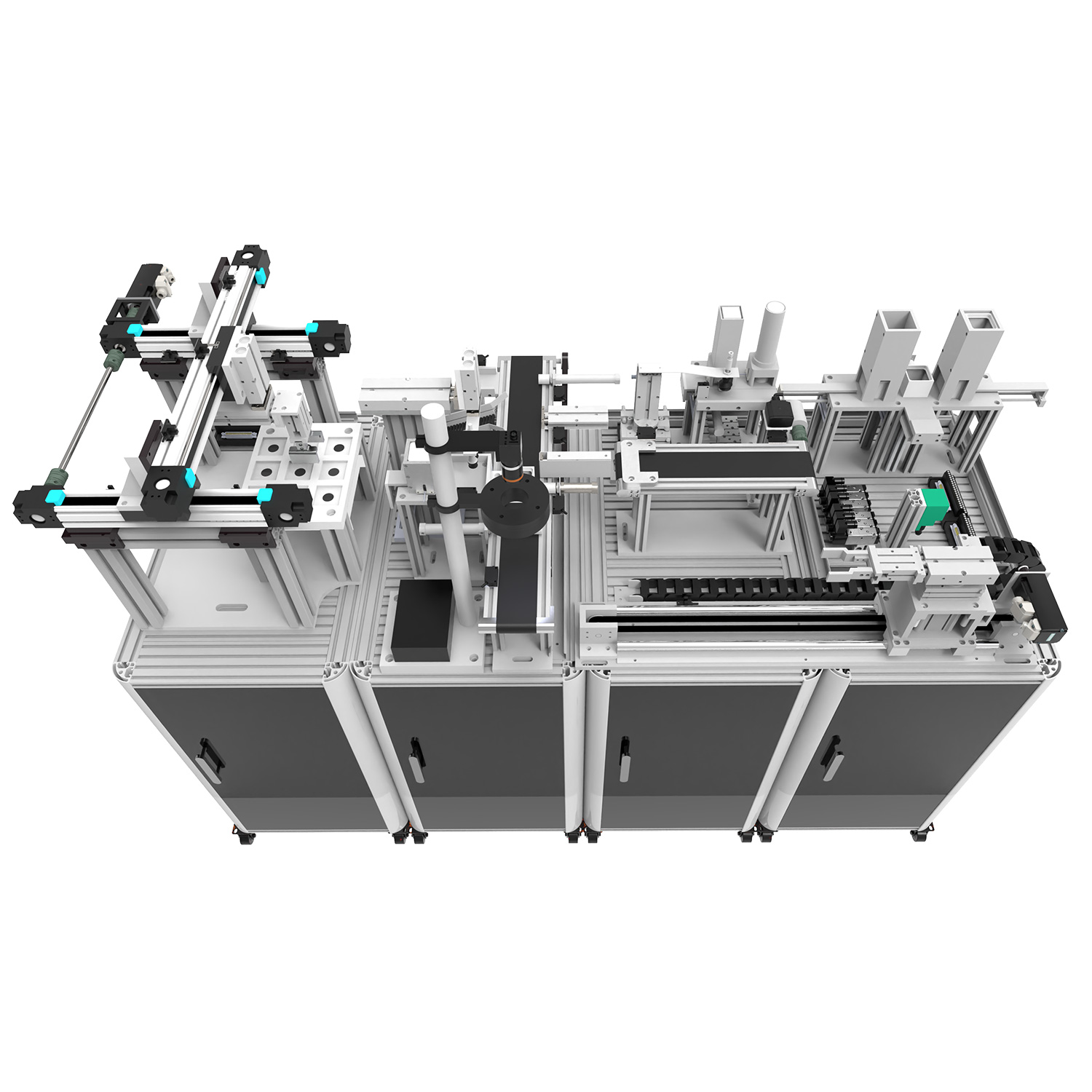

Product Introduction
The virtual real combination production line training device is a modular teaching workstation for automatic assembly. The workstation covers various technological applications such as interconnection control technology, transmission technology, human-computer interaction technology, visual inspection technology, mechanical technology, sensing and pneumatic technology, and various industrial fieldbus communication technologies. Among them, the interconnection control and human-computer interaction technology carriers are equipped with top domestic and foreign brands, ensuring the stability and reliability of the system's teaching process.
Product Features
Main modules

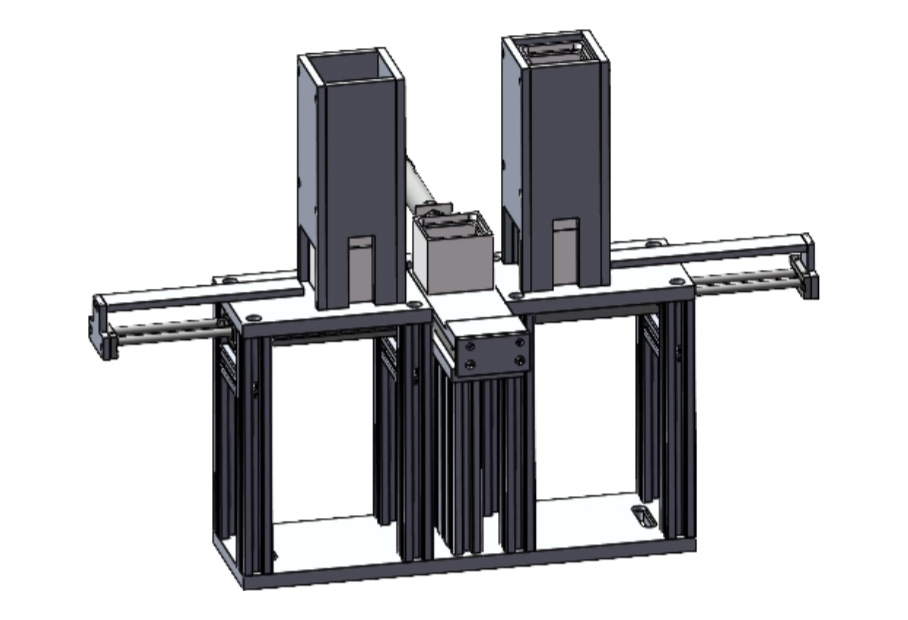
Feeding unit
The bottle feeding unit adopts a double well feeding structure, with two silos that can store two types of material bottles at the same time, serving as a dual bin feeding mechanism.

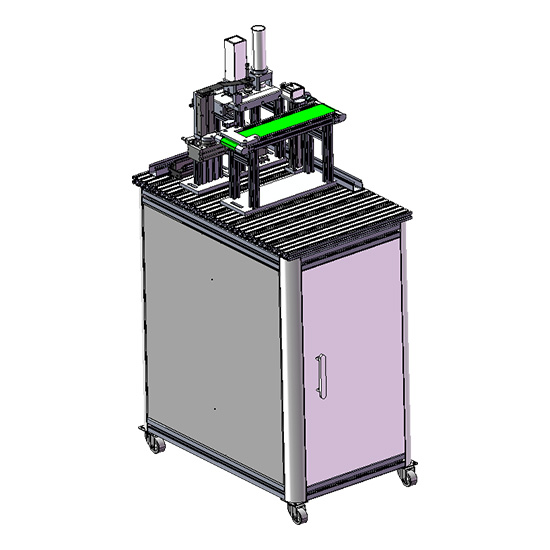
Conveyor unit
The vertical conveying unit is driven by a three-phase AC motor and executed by a cylinder. Used for several functions including pneumatic blocking, material storage, material clamping, and material recycling. Equipped with a kick waste storage location and a track for incoming goods, with an information reading module located below the track.

Longmen robotic arm
The XY axis of the gantry robotic arm module is driven by servo motors to achieve precise positioning of product placement, while the Z-axis and product grasping/placement use pneumatic structures to improve the efficiency of fixed-point grasping and placing.

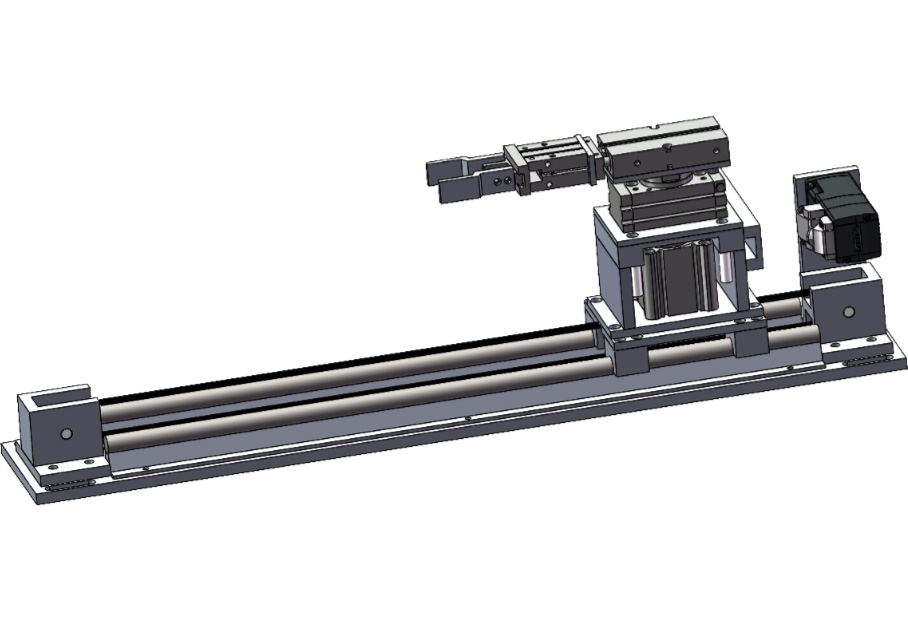
Mechanical arm handling unit
The mechanical arm handling unit is driven and controlled by a servo motor, which can achieve precise positioning within the stroke. At the same time, multiple cylinders (lifting cylinder, rotating cylinder, dual axis cylinder, pneumatic finger) are used in conjunction to achieve the grasping and placement of material objects.
Office Address: Unit 3, Building 8, New Vertical Education Toy Incubation Park, Qiaoxia Town, Yongjia County, Wenzhou City, Zhejiang Province
Copyright (C) 2024 Zhejiang Boheng Teaching Equipment Co., Ltd Copyright Zhejiang ICP preparation xxxxxxxx. Technical support: Xunxiang Technology

Official Weibo

Tiktok

WeChat official account



