
工业机器人





BOH-GY06F型氩弧焊应用工作站
该实训平台由ABB工业机器人IRB-1410本体、IRC5单柜型控制器、焊接电源、焊枪组成,可以满足工业机器人及工业焊接教学及项目实训。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员
分类:
货号:
BOH-GY06F型
分享
相关产品
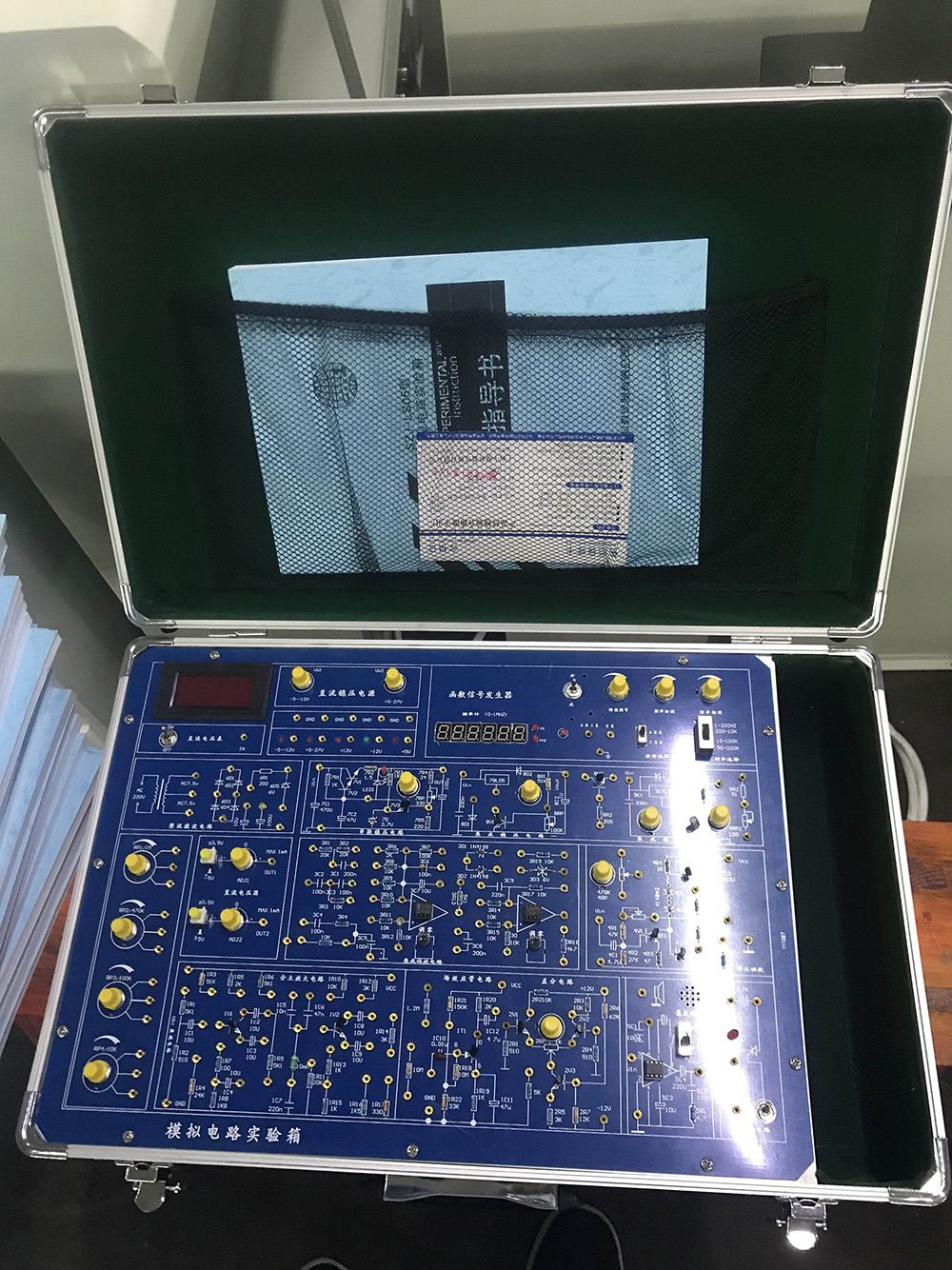
技术指标
1、工作电源
1)输入:AC220V±10%,50HZ。
2)输出:(1)ACV 0V、14V、16V、18V和带中心抽头双路7.5V低压交流电源(AC50Hz)。
有短路保护功能。
(2)DCV ±1.5V~±15V连续可调,有短路保护自动恢复功能。
(3)DCV ±12V/0.5A, 5V/0.5A,有短路保护自动恢复功能。
3)完善的电源保护电路:过流保护、过压保护、接反保护。
2、信号源
1)直流信号源:双路-5V~+5V, -0.5V~+0.5V连续可调。
2)函数发生器
输出波形:方波、三角波、正弦波
幅值:正弦波:0~10V(10V为峰—峰值,且正负对称)
三角波:0~20V(20V为峰—峰值,且正负对称)
方波:0~20V(20V为峰—峰值,且正负对称)
频率范围:分四档10HZ~100HZ、100HZ~1KHZ、1KHZ~10KHZ、10KHZ~100KHZ。
3、单级放大电路
4、二级放大电路
5、射极跟随器电路
6、差动放大电路
7、负反馈放大电路
8、半波、全波、桥式整流和滤波电路
9、并联稳压电路
10、集成功率放大电路
11、互补对称功率放大电路
13、2组运算放大器电路
14、分立元件区:设计有1个8Ω扬声器、1个桥堆、1个单结晶体管BT33、1个470uF和0.1uF电容、4个5.1V稳压管、1个三极管接插做、1个集成稳压管接插座、1个1W/51电阻、1个51K电阻,另有二极管、电容、电阻、三极管等分立元件接入区,用镀银长紫铜管做插孔,可以满足大小不同的管脚的接插。
15、指针式直流毫安表1只,量程为1mA,内阻为100Ω。
16、实验板采用2mm厚印制线路板制成。
17、采用高可靠自锁紧防转叠插座作为实验连接点。
18、可以根据需要,另行开发其它实验电路。
19、机箱:坚固型铝合金框架,厚实的 ABS 塑料包角,参考外形尺寸 480×360×120mm。

1、输入电压:单相三线~220V±10% 50Hz
2、装置容量:<1kVA
3、工作环境:温度-10℃~+40℃相对湿度<85%(25℃)
4、装置容量:<500VA
5、外形尺寸:实训台尺寸为1.6m×0.75m×1.35m。
产品结构:
装置由仪器架、主机箱、整室电源智能管理箱、实验桌、学生凳等组成。实验装置支架与实验桌可组合、可拆装。支架与桌脚一体,铝合金结构。
(一)仪器架:仪器架置于实训台顶部,由截面尺寸:90mm×90mm,高性能表面氧化的铝型材、双面喷塑钢板及一次成型铝压铸框架连接构件构成(非焊接工艺),外形美观,结构牢固耐用。仪器架底部装有2套隐藏式扁平形照明LED灯,2套照明LED灯每工位独立控制。光源集中柔和明亮,外形美观。
(二)电源主机箱:在主机箱顶部每工位内嵌4路AC220V输出,漏电保护开关,电源控制箱置于仪器架下部,仪器仪表电用安全方便。并装有LED灯控制开关。
(三)实训桌结构:
实训桌规格为1600(长)*750(宽)*1350(高),设有二个抽屉;实验桌主体结构全部采用高性能表面氧化的铝型材及一次成型铝压铸框架连接构件,连接构件采用压铸成型工艺(非焊接工艺),经机加工、抛丸、喷砂,表面静电喷涂工艺,安装方便、快捷,用户可自行DIY组装。桌体立柱采用工业铝型材成型工艺,表面氧化处理,截面尺寸:90mm×90mm,四面带槽,槽宽约8mm,端部装有注塑成型配套塑料堵头。桌面采用25mm三聚氰胺饰面板,配有一块防静电绝缘皮。贴桌面板下设支撑框架,承受力不少于200kg。实训装置整体简约不简单,高端大气,符合现代化产品审美和发展趋势。
实验桌后面二支截面尺寸90mm×90mm桌脚向上延伸,与一次成型铝压铸框架连接构件构成(非焊接工艺)牢固的支架,与仪器架、电源控制箱组成一个完整的实训屏。

本装置是根据劳动和社会保障部颁发的“工人等级标准”和“职业技能鉴定”的要求而设计的,它适用于《初级维修电工》、《中级维修电工》和《高级维修电工》教材要求的电气控制线路,通过装置配备的PLC可编程控制器和变频调速器及相应实训模块的训练,快速掌握课程要求的实际应用技术和操作技能,具有针对性、实用性、科学性和先进性,它能满足中、高级维修电工考核大纲的要求,是各劳动职业技能鉴定部门、大中专院校、技校中、高级维修电工技能考核的理想设备。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

本装置是根据劳动和社会保障部颁发的维修电工初、中级考核培训技能内容所要求的电气控制线路和实用电子线路而研发的实训装置,通过本实训装置的实训操作,能快速掌握该课程的实用技术与操作技能。具有针对性、实用性、科学性和先进性,该装置不仅可供学生实训操作,也是各劳动职业技能鉴定部门、大中专院校、职校、技校初级、中级维修电工技能考核的理想设备。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员
办公地址:浙江省温州市永嘉县桥下镇新纵教玩具孵化园8栋3单元
销售咨询:13732023530、15858864466、19975218786、13345876015
技术咨询:15058335858
联系电话:4008-269-589、0577-66961670
公司邮箱:bh@boheng.com.cn
(一)ABB IRB 1410 工业机器人
1.轴数:6。
2.集成信号源:上臂设12路信号。
3.集成气源:上臂最高8bar。
4.★承重能力:5kg。
5.★第5轴到达距离:1.44m。
6.防护等级:IP54。
7.★重复定位精度:0.05mm。
8.TCP最大速度:2.1 m/s。
9.电源电压:200~600 V,50/60HZ。
10.额定功率:4.0 kV˙A。
11.变压器额定值:7.8 kV˙A。
12.安装方式:落地式。
13.重量:225kg。
14.运动范围:轴1旋转:±170°;轴2手臂:±70°;轴3手臂:+65°~-70°;;轴4手腕:±150°;;轴5弯曲:±115°;轴6翻转:±300°
15.最大速度:轴1旋转:120°/s; 轴2手臂:120°/s;轴3手臂:120°/s;轴4手臂:280°/s;轴5手腕:280°/s;轴6翻转:280°/s。
(二)工业机器人控制系统技术规格
1.★输入/输出:最多8192个信号。
2.数字信号:24V DC或继电器信号。16输入16输出
3.模拟信号:2x0-10V。
4.串行通道:1xRS 232/RS 422。
5.控制硬件:多处理器系统;PCI总线;Pentium® CPU;大容量存储用闪存或硬盘;备用电源,以防电源故障;USB存储接口。
6.控制软件:对象主导型设计;高级RAPID机器人编程语言;可移植,开放式,可扩展;PC-DOS文件格式;预装软件,另提供光盘。
▲示教器:重约1 kg;彩色图形界面触摸屏;操纵杆;紧急停机;热插拔;左右手操作支持。
一.产品简介
该实训平台由ABB工业机器人IRB-1410本体、IRC5单柜型控制器、焊接电源、焊枪组成,可以满足工业机器人及工业焊接教学及项目实训。
焊接机器人是一种高度自动化的焊接设备.采用机器人代替手工焊接作业是焊接制造业的发展趋势,是提高焊接质量、降低成本、改善工作环境的重要手段。机器人焊接作为现代制造技术发展的重要标志己被国内许多工厂所接受,并且越来越多的企业首选焊接机器人作为技术改造的方案。
二.技术性能
输入电压:三相 AC 380V±10% 50HZ;
工作环境:环境温度范围为-5℃~+40℃,相对湿度<85%(25℃),海拔<4000m;
装置容量:<0.6kVA;
气源压力:≥0.4Mpa;
三.模块介绍
1.机器人底座 定制
采用高强度铸铁,组织稳定,确保品质。铸件结构均经过机床动力学分析和有限元分析,合理的结构程度与加强筋搭配,保证基础件高刚性。
规格:L700×W700,高度可根据具体应用单元而定。
机器人专用,保证与机器人本体匹配。
2.焊接系统
由送丝机、焊机、焊机电源组成,采用全电流领域电弧稳定,飞溅小,同一台焊机,既适用于小电流打底焊接,也适合大电流高熔敷率工作。
电弧集中、穿透力强。
间隙搭桥能力强、干伸长不敏感,适应全位置及新手焊接。
采用熔滴缩颈检测与控制微观技术。
机器人数字接口,可定制更多的焊接工艺与软件升级。
▲焊接电源:
输入电源:3相,380V,50/60Hz。
输入频率:30~400A。
输入容量:13.5KVA。
额定开路电压:63.7V。
额定输出电流范围:30~400A。
额定输出电压范围:12~38V。
额定暂载率:350A@100%@40°C。
焊接方法:CO2/MAG/MMA。
焊丝直径:0.8/1.0/1.2mm。
焊接时序:无收弧、有收弧、反复收弧、点焊。
焊机参数通道存储:默认10组。
电弧特性:-9-+9。
机器人通讯:有。
冷却方式:智能风冷。
送丝速度:1.4~24m/min。
防护等级:IP23S。
3.焊枪
冷却方式:空冷。
暂载率(10min):100%。
焊接电流(CO2):350A。
焊丝直径:0.8/1.0/1.2mm。
含防碰撞功能。
4.焊接工装夹具
另配2个快速夹钳。
5.变位机
底座尺寸:400mm*250mm*300mm
驱动方式:交流伺服驱动。
最大负载:100Kg。
▲重复定位精度:±0.20mm。
运动范围:回转轴±370°。
最大转速:回转轴约124°/S。
环境温度:温度:0℃~45℃;
湿度:20%~80%(无凝露)。
安装方式:地面安装。
质量:约100kg。
6.变位机底座
优质方通焊接而成,结构稳固,表面黑色烤漆。
7.快速夹具
夹具是加工时用来迅速紧固工件,使机床、刀具、工件保持正确相对位置的工艺装置。
8.定制控制柜
外形尺寸:400mm*250mm*400mm
优质钣金焊接而成,内漏电开关等必须电气元件。
9.气瓶
焊接气瓶,焊接专用气体,有CO2气体以及ar气体混合而成。
10.安全围栏
规格:高约1米。
采用工业级网格形金属围栏。
包含关门检测传感器,具有警报灯。
四.工具
定制焊接工件
五.可实训项目
机器人安全操作注意事项
机器人开关机的操作
机器人控制面板菜单 的介绍
机器人设定系统的日期与时间
机器人系统状态信息及事件日志查看
机器人系统的备份与恢复
机器人的手动操纵——单轴运动
机器人的手动操纵——线性运动
机器人手动操纵的快捷方式
机器人转数计数器的更新操作
机器人IO通讯及标准通讯板的认识
机器人标准IO板的参数设定
机器人系统输入输出与IO信号的关联
机器人示教器可编程按钮的使用
机器人三个重要程序数据
机器人创建程序模块及例行程序的方法
机器人例行程序编程操作方法
机器人的常用指令——MoveJ
机器人的常用指令——MoveL
机器人的常用指令——MoveC
机器人的常用指令——赋值指令
机器人的常用指令——IO指令
机器人的常用指令——逻辑判断指令
机器人的中断应用
机器人的安全保护机制
工业机器人本体与控制器之间的电气连接与调试技术
工业机器控制器和控制柜之间电气连接与调试技术
工业机器人夹具电气连接与调试技术
工业机器人焊接系统电气连接与调试技术
工业机器人焊接系统送丝机控制系统的连接与调试
工业机器人直焊实训练习
工业机器人弧焊实训练习
工业机器人与变位机的配合焊接实训练习
工业机器人弧焊的编程设定
工业机器人圆焊的编程设定
工业机器人直焊的编程设定






